ಎರಡು ನೇರ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನ. ಛೇದಿಸುವ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನ: ವ್ಯಾಖ್ಯಾನ, ಕಂಡುಹಿಡಿಯುವ ಉದಾಹರಣೆಗಳು
ಎ. ಎರಡು ಸರಳ ರೇಖೆಗಳನ್ನು ನೀಡೋಣ, ಅಧ್ಯಾಯ 1 ರಲ್ಲಿ ಸೂಚಿಸಿದಂತೆ ಈ ಸರಳ ರೇಖೆಗಳು ವಿವಿಧ ಧನಾತ್ಮಕ ಮತ್ತು ಋಣಾತ್ಮಕ ಕೋನಗಳನ್ನು ರೂಪಿಸುತ್ತವೆ, ಅವುಗಳು ತೀಕ್ಷ್ಣವಾದ ಅಥವಾ ಚೂಪಾದವಾಗಿರಬಹುದು. ಈ ಕೋನಗಳಲ್ಲಿ ಒಂದನ್ನು ತಿಳಿದುಕೊಂಡರೆ, ನಾವು ಇನ್ನೊಂದನ್ನು ಸುಲಭವಾಗಿ ಕಂಡುಹಿಡಿಯಬಹುದು.
ಮೂಲಕ, ಈ ಎಲ್ಲಾ ಕೋನಗಳಿಗೆ ಸ್ಪರ್ಶಕದ ಸಂಖ್ಯಾತ್ಮಕ ಮೌಲ್ಯವು ಒಂದೇ ಆಗಿರುತ್ತದೆ, ವ್ಯತ್ಯಾಸವು ಚಿಹ್ನೆಯಲ್ಲಿ ಮಾತ್ರ ಇರುತ್ತದೆ

ರೇಖೆಗಳ ಸಮೀಕರಣಗಳು. ಸಂಖ್ಯೆಗಳು ಮೊದಲ ಮತ್ತು ಎರಡನೆಯ ನೇರ ರೇಖೆಗಳ ದಿಕ್ಕಿನ ವಾಹಕಗಳ ಪ್ರಕ್ಷೇಪಗಳಾಗಿವೆ.ಈ ವಾಹಕಗಳ ನಡುವಿನ ಕೋನವು ನೇರ ರೇಖೆಗಳಿಂದ ರೂಪುಗೊಂಡ ಕೋನಗಳಲ್ಲಿ ಒಂದಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಆದ್ದರಿಂದ, ವಾಹಕಗಳ ನಡುವಿನ ಕೋನವನ್ನು ನಿರ್ಧರಿಸಲು ಸಮಸ್ಯೆ ಬರುತ್ತದೆ
![]()
ಸರಳತೆಗಾಗಿ, ಎರಡು ನೇರ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವು ತೀವ್ರವಾದ ಧನಾತ್ಮಕ ಕೋನವಾಗಿದೆ ಎಂದು ನಾವು ಒಪ್ಪಿಕೊಳ್ಳಬಹುದು (ಉದಾಹರಣೆಗೆ, ಚಿತ್ರ 53 ರಲ್ಲಿ).

ಆಗ ಈ ಕೋನದ ಸ್ಪರ್ಶಕವು ಯಾವಾಗಲೂ ಧನಾತ್ಮಕವಾಗಿರುತ್ತದೆ. ಹೀಗಾಗಿ, ಸೂತ್ರದ ಬಲಭಾಗದಲ್ಲಿ ಮೈನಸ್ ಚಿಹ್ನೆ ಇದ್ದರೆ (1), ನಂತರ ನಾವು ಅದನ್ನು ತ್ಯಜಿಸಬೇಕು, ಅಂದರೆ, ಸಂಪೂರ್ಣ ಮೌಲ್ಯವನ್ನು ಮಾತ್ರ ಉಳಿಸಿ.
ಉದಾಹರಣೆ. ನೇರ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವನ್ನು ನಿರ್ಧರಿಸಿ

ಸೂತ್ರದ ಪ್ರಕಾರ (1) ನಾವು ಹೊಂದಿದ್ದೇವೆ
ಜೊತೆಗೆ. ಕೋನದ ಯಾವ ಬದಿಗಳು ಅದರ ಪ್ರಾರಂಭ ಮತ್ತು ಅದರ ಅಂತ್ಯ ಎಂದು ಸೂಚಿಸಿದರೆ, ಯಾವಾಗಲೂ ಕೋನದ ದಿಕ್ಕನ್ನು ಅಪ್ರದಕ್ಷಿಣಾಕಾರವಾಗಿ ಎಣಿಸುವ ಮೂಲಕ, ನಾವು ಸೂತ್ರದಿಂದ (1) ಹೆಚ್ಚಿನದನ್ನು ಹೊರತೆಗೆಯಬಹುದು. ಅಂಜೂರದಿಂದ ನೋಡಲು ಸುಲಭವಾದಂತೆ. 53, ಸೂತ್ರದ ಬಲಭಾಗದಲ್ಲಿ (1) ಪಡೆದ ಚಿಹ್ನೆಯು ಯಾವ ರೀತಿಯ ಕೋನವನ್ನು ಸೂಚಿಸುತ್ತದೆ - ತೀವ್ರ ಅಥವಾ ಚೂಪಾದ - ಎರಡನೆಯ ಸರಳ ರೇಖೆಯು ಮೊದಲನೆಯದರೊಂದಿಗೆ ರೂಪುಗೊಳ್ಳುತ್ತದೆ.
(ವಾಸ್ತವವಾಗಿ, ಚಿತ್ರ 53 ರಿಂದ ನಾವು ಮೊದಲ ಮತ್ತು ಎರಡನೆಯ ದಿಕ್ಕಿನ ವಾಹಕಗಳ ನಡುವಿನ ಕೋನವು ಸರಳ ರೇಖೆಗಳ ನಡುವಿನ ಅಪೇಕ್ಷಿತ ಕೋನಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ ಅಥವಾ ಅದರಿಂದ ± 180 ° ಭಿನ್ನವಾಗಿರುತ್ತದೆ.)
ಡಿ. ರೇಖೆಗಳು ಸಮಾನಾಂತರವಾಗಿದ್ದರೆ, ಅವುಗಳ ದಿಕ್ಕಿನ ವಾಹಕಗಳು ಸಮಾನಾಂತರವಾಗಿರುತ್ತವೆ ಎರಡು ವೆಕ್ಟರ್ಗಳ ಸಮಾನಾಂತರತೆಯ ಸ್ಥಿತಿಯನ್ನು ಅನ್ವಯಿಸುವುದರಿಂದ, ನಾವು ಪಡೆಯುತ್ತೇವೆ!
![]()
ಎರಡು ಸಾಲುಗಳ ಸಮಾನಾಂತರತೆಗೆ ಇದು ಅವಶ್ಯಕ ಮತ್ತು ಸಾಕಷ್ಟು ಸ್ಥಿತಿಯಾಗಿದೆ.
ಉದಾಹರಣೆ. ನೇರ
ಏಕೆಂದರೆ ಸಮಾನಾಂತರವಾಗಿರುತ್ತವೆ
![]()
ಇ. ರೇಖೆಗಳು ಲಂಬವಾಗಿದ್ದರೆ ಅವುಗಳ ದಿಕ್ಕಿನ ವಾಹಕಗಳು ಸಹ ಲಂಬವಾಗಿರುತ್ತವೆ. ಎರಡು ವಾಹಕಗಳ ಲಂಬತೆಯ ಸ್ಥಿತಿಯನ್ನು ಅನ್ವಯಿಸುವುದರಿಂದ, ನಾವು ಎರಡು ಸರಳ ರೇಖೆಗಳ ಲಂಬತೆಯ ಸ್ಥಿತಿಯನ್ನು ಪಡೆಯುತ್ತೇವೆ, ಅವುಗಳೆಂದರೆ
ಉದಾಹರಣೆ. ನೇರ
ಎಂಬ ಅಂಶದಿಂದಾಗಿ ಲಂಬವಾಗಿರುತ್ತವೆ
ಸಮಾನಾಂತರತೆ ಮತ್ತು ಲಂಬತೆಯ ಪರಿಸ್ಥಿತಿಗಳಿಗೆ ಸಂಬಂಧಿಸಿದಂತೆ, ನಾವು ಈ ಕೆಳಗಿನ ಎರಡು ಸಮಸ್ಯೆಗಳನ್ನು ಪರಿಹರಿಸುತ್ತೇವೆ.
f. ಕೊಟ್ಟಿರುವ ರೇಖೆಗೆ ಸಮಾನಾಂತರವಾಗಿರುವ ಬಿಂದುವಿನ ಮೂಲಕ ರೇಖೆಯನ್ನು ಎಳೆಯಿರಿ
ಪರಿಹಾರವನ್ನು ಈ ರೀತಿ ನಡೆಸಲಾಗುತ್ತದೆ. ಅಪೇಕ್ಷಿತ ರೇಖೆಯು ಇದಕ್ಕೆ ಸಮಾನಾಂತರವಾಗಿರುವುದರಿಂದ, ಅದರ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ಗೆ ನಾವು ನೀಡಿದ ರೇಖೆಯಂತೆಯೇ ಅದೇ ತೆಗೆದುಕೊಳ್ಳಬಹುದು, ಅಂದರೆ, ಎ ಮತ್ತು ಬಿ ಪ್ರಕ್ಷೇಪಗಳೊಂದಿಗೆ ವೆಕ್ಟರ್ ಅನ್ನು ತೆಗೆದುಕೊಳ್ಳಬಹುದು. ತದನಂತರ ಬಯಸಿದ ರೇಖೆಯ ಸಮೀಕರಣವನ್ನು ಬರೆಯಲಾಗುತ್ತದೆ ರೂಪ (§ 1)
ಉದಾಹರಣೆ. ರೇಖೆಗೆ ಸಮಾನಾಂತರವಾಗಿ ಪಾಯಿಂಟ್ (1; 3) ಮೂಲಕ ಹಾದುಹೋಗುವ ರೇಖೆಯ ಸಮೀಕರಣ
ಮುಂದೆ ಇರುತ್ತದೆ!
ಜಿ. ಕೊಟ್ಟಿರುವ ರೇಖೆಗೆ ಲಂಬವಾಗಿರುವ ಬಿಂದುವಿನ ಮೂಲಕ ರೇಖೆಯನ್ನು ಎಳೆಯಿರಿ
ಇಲ್ಲಿ ವೆಕ್ಟರ್ ಅನ್ನು ಪ್ರಕ್ಷೇಪಣಗಳೊಂದಿಗೆ ತೆಗೆದುಕೊಳ್ಳಲು ಇನ್ನು ಮುಂದೆ ಸೂಕ್ತವಲ್ಲ ಮತ್ತು ಮಾರ್ಗದರ್ಶಿ ವೆಕ್ಟರ್ ಆಗಿ, ಆದರೆ ಅದಕ್ಕೆ ಲಂಬವಾಗಿ ವೆಕ್ಟರ್ ಅನ್ನು ತೆಗೆದುಕೊಳ್ಳುವುದು ಅವಶ್ಯಕ. ಆದ್ದರಿಂದ ಈ ವೆಕ್ಟರ್ನ ಪ್ರಕ್ಷೇಪಗಳನ್ನು ಎರಡೂ ವೆಕ್ಟರ್ಗಳ ಲಂಬತೆಯ ಸ್ಥಿತಿಯ ಪ್ರಕಾರ ಆಯ್ಕೆ ಮಾಡಬೇಕು, ಅಂದರೆ ಸ್ಥಿತಿಯ ಪ್ರಕಾರ
ಈ ಸ್ಥಿತಿಯನ್ನು ಲೆಕ್ಕವಿಲ್ಲದಷ್ಟು ರೀತಿಯಲ್ಲಿ ಪೂರೈಸಬಹುದು, ಏಕೆಂದರೆ ಇಲ್ಲಿ ಎರಡು ಅಪರಿಚಿತರೊಂದಿಗೆ ಒಂದು ಸಮೀಕರಣವಿದೆ, ಆದರೆ ಸುಲಭವಾದ ಮಾರ್ಗವೆಂದರೆ ತೆಗೆದುಕೊಳ್ಳುವುದು ಅಥವಾ ನಂತರ ಬಯಸಿದ ಸಾಲಿನ ಸಮೀಕರಣವನ್ನು ರೂಪದಲ್ಲಿ ಬರೆಯಲಾಗುತ್ತದೆ.
ಉದಾಹರಣೆ. ಲಂಬ ರೇಖೆಯಲ್ಲಿ ಪಾಯಿಂಟ್ (-7; 2) ಮೂಲಕ ಹಾದುಹೋಗುವ ರೇಖೆಯ ಸಮೀಕರಣ
ಕೆಳಗಿನವುಗಳು ಇರುತ್ತವೆ (ಎರಡನೆಯ ಸೂತ್ರದ ಪ್ರಕಾರ)!
ಗಂ. ರೂಪದ ಸಮೀಕರಣಗಳಿಂದ ಸಾಲುಗಳನ್ನು ನೀಡಿದಾಗ
ಸೂಚನೆಗಳು
ಸೂಚನೆ
ಅವಧಿ ತ್ರಿಕೋನಮಿತಿಯ ಕಾರ್ಯಸ್ಪರ್ಶಕವು 180 ಡಿಗ್ರಿಗಳಿಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, ಅಂದರೆ ನೇರ ರೇಖೆಗಳ ಇಳಿಜಾರಿನ ಕೋನಗಳು ಸಂಪೂರ್ಣ ಮೌಲ್ಯದಲ್ಲಿ ಈ ಮೌಲ್ಯವನ್ನು ಮೀರುವುದಿಲ್ಲ.
ಒಂದು ವೇಳೆ ಇಳಿಜಾರುಗಳುಪರಸ್ಪರ ಸಮಾನವಾಗಿರುತ್ತದೆ, ನಂತರ ಅಂತಹ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವು 0 ಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, ಏಕೆಂದರೆ ಅಂತಹ ಸಾಲುಗಳು ಹೊಂದಿಕೆಯಾಗುತ್ತವೆ ಅಥವಾ ಸಮಾನಾಂತರವಾಗಿರುತ್ತವೆ.
ಛೇದಿಸುವ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನದ ಮೌಲ್ಯವನ್ನು ನಿರ್ಧರಿಸಲು, ಛೇದಿಸುವವರೆಗೆ ಸಮಾನಾಂತರ ಅನುವಾದ ವಿಧಾನವನ್ನು ಬಳಸಿಕೊಂಡು ಹೊಸ ಸ್ಥಾನಕ್ಕೆ ಎರಡೂ ಸಾಲುಗಳನ್ನು (ಅಥವಾ ಅವುಗಳಲ್ಲಿ ಒಂದನ್ನು) ಸರಿಸಲು ಅವಶ್ಯಕ. ಇದರ ನಂತರ, ಪರಿಣಾಮವಾಗಿ ಛೇದಿಸುವ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವನ್ನು ನೀವು ಕಂಡುಹಿಡಿಯಬೇಕು.

ನಿಮಗೆ ಅಗತ್ಯವಿರುತ್ತದೆ
- ಆಡಳಿತಗಾರ, ಬಲ ತ್ರಿಕೋನ, ಪೆನ್ಸಿಲ್, ಪ್ರೊಟ್ರಾಕ್ಟರ್.
ಸೂಚನೆಗಳು
ಆದ್ದರಿಂದ, ವೆಕ್ಟರ್ V = (a, b, c) ಮತ್ತು ಪ್ಲೇನ್ A x + B y + C z = 0 ಅನ್ನು ನೀಡೋಣ, ಅಲ್ಲಿ A, B ಮತ್ತು C ಸಾಮಾನ್ಯ N ನ ನಿರ್ದೇಶಾಂಕಗಳಾಗಿವೆ. ನಂತರ ಕೋನದ ಕೊಸೈನ್ α ವೆಕ್ಟರ್ V ಮತ್ತು N ನಡುವೆ ಸಮಾನವಾಗಿರುತ್ತದೆ: cos α = (a + b + c C)/(√(a² + b² + c²) √(A² + B² + C²)).
ಡಿಗ್ರಿ ಅಥವಾ ರೇಡಿಯನ್ಗಳಲ್ಲಿ ಕೋನವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು, ನೀವು ಪರಿಣಾಮವಾಗಿ ಅಭಿವ್ಯಕ್ತಿಯಿಂದ ಕೊಸೈನ್ ಕಾರ್ಯಕ್ಕೆ ವಿಲೋಮವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಬೇಕಾಗುತ್ತದೆ, ಅಂದರೆ. arccosine:α = arsсos ((a + b B + c C)/(√(a² + b² + c²) √(A² + B² + C²))).
ಉದಾಹರಣೆ: ಹುಡುಕಿ ಮೂಲೆಯಲ್ಲಿನಡುವೆ ವೆಕ್ಟರ್(5, -3, 8) ಮತ್ತು ವಿಮಾನ, ಸಾಮಾನ್ಯ ಸಮೀಕರಣದಿಂದ ನೀಡಲಾಗಿದೆ 2 x – 5 y + 3 z = 0. ಪರಿಹಾರ: ಸಮತಲದ N = (2, -5, 3) ನ ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ನ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಬರೆಯಿರಿ. ಎಲ್ಲವನ್ನೂ ಬದಲಿಸಿ ತಿಳಿದಿರುವ ಮೌಲ್ಯಗಳುಕೊಟ್ಟಿರುವ ಸೂತ್ರದಲ್ಲಿ: cos α = (10 + 15 + 24)/√3724 ≈ 0.8 → α = 36.87°.
ವಿಷಯದ ಕುರಿತು ವೀಡಿಯೊ
ಅದೇ ಸುತ್ತಳತೆಯನ್ನು ಹೊಂದಿರುವ ನೇರ ರೇಖೆ ಸಾಮಾನ್ಯ ಬಿಂದು, ವೃತ್ತಕ್ಕೆ ಸ್ಪರ್ಶಕವಾಗಿದೆ. ಸ್ಪರ್ಶದ ಮತ್ತೊಂದು ವೈಶಿಷ್ಟ್ಯವೆಂದರೆ ಅದು ಯಾವಾಗಲೂ ಸಂಪರ್ಕದ ಬಿಂದುವಿಗೆ ಎಳೆಯುವ ತ್ರಿಜ್ಯಕ್ಕೆ ಲಂಬವಾಗಿರುತ್ತದೆ, ಅಂದರೆ, ಸ್ಪರ್ಶಕ ಮತ್ತು ತ್ರಿಜ್ಯವು ಸರಳ ರೇಖೆಯನ್ನು ರೂಪಿಸುತ್ತದೆ. ಮೂಲೆಯಲ್ಲಿ. AB ಮತ್ತು AC ವೃತ್ತಕ್ಕೆ ಎರಡು ಸ್ಪರ್ಶಕಗಳನ್ನು ಒಂದು ಬಿಂದುವಿನಿಂದ A ನಿಂದ ಎಳೆದರೆ, ಅವು ಯಾವಾಗಲೂ ಪರಸ್ಪರ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಸ್ಪರ್ಶಕಗಳ ನಡುವಿನ ಕೋನವನ್ನು ನಿರ್ಧರಿಸುವುದು ( ಮೂಲೆಯಲ್ಲಿಎಬಿಸಿ) ಪೈಥಾಗರಿಯನ್ ಪ್ರಮೇಯವನ್ನು ಬಳಸಿ ತಯಾರಿಸಲಾಗುತ್ತದೆ.

ಸೂಚನೆಗಳು
ಕೋನವನ್ನು ನಿರ್ಧರಿಸಲು, ನೀವು OB ಮತ್ತು OS ವೃತ್ತದ ತ್ರಿಜ್ಯವನ್ನು ಮತ್ತು ವೃತ್ತದ ಮಧ್ಯಭಾಗದಿಂದ ಸ್ಪರ್ಶಕದ ಪ್ರಾರಂಭದ ಬಿಂದುವಿನ ಅಂತರವನ್ನು ತಿಳಿದುಕೊಳ್ಳಬೇಕು - O. ಆದ್ದರಿಂದ, ABO ಮತ್ತು ACO ಕೋನಗಳು ಸಮಾನವಾಗಿರುತ್ತದೆ, OB ತ್ರಿಜ್ಯವು, ಉದಾಹರಣೆಗೆ, 10 cm, ಮತ್ತು AO ವೃತ್ತದ ಮಧ್ಯಭಾಗಕ್ಕೆ ಇರುವ ಅಂತರವು 15 cm. ಪೈಥಾಗರಿಯನ್ ಪ್ರಮೇಯಕ್ಕೆ ಅನುಗುಣವಾಗಿ ಸೂತ್ರವನ್ನು ಬಳಸಿಕೊಂಡು ಸ್ಪರ್ಶಕದ ಉದ್ದವನ್ನು ನಿರ್ಧರಿಸಿ: AB = ವರ್ಗ ಮೂಲ AO2 ನಿಂದ - OB2 ಅಥವಾ 152 - 102 = 225 - 100 = 125;
ಕಾರ್ಟಿಸಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಸಮತಲದಲ್ಲಿ ಎರಡು ಸರಳ ರೇಖೆಗಳು l ಮತ್ತು m ಅನ್ನು ಸಾಮಾನ್ಯ ಸಮೀಕರಣಗಳಿಂದ ನೀಡೋಣ: l: A 1 x + B 1 y + C 1 = 0, m: A 2 x + B 2 y + C 2 = 0
ಈ ಸಾಲುಗಳಿಗೆ ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ಗಳು: = (A 1 , B 1) – ಗೆ l ಗೆ,
= (A 2, B 2) - ಲೈನ್ ಮೀ ಗೆ.
l ಮತ್ತು m ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವು j ಆಗಿರಲಿ.


ಪರಸ್ಪರ ಲಂಬವಾಗಿರುವ ಬದಿಗಳನ್ನು ಹೊಂದಿರುವ ಕೋನಗಳು ಸಮಾನವಾಗಿರುತ್ತವೆ ಅಥವಾ p ಗೆ ಸೇರಿಸುವುದರಿಂದ, ನಂತರ ![]() , ಅಂದರೆ, cos j = .
, ಅಂದರೆ, cos j = .
ಆದ್ದರಿಂದ, ನಾವು ಈ ಕೆಳಗಿನ ಪ್ರಮೇಯವನ್ನು ಸಾಬೀತುಪಡಿಸಿದ್ದೇವೆ.
ಪ್ರಮೇಯ. j ಎಂಬುದು ಸಮತಲದ ಮೇಲಿನ ಎರಡು ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವಾಗಿರಲಿ, ಮತ್ತು ಈ ರೇಖೆಗಳನ್ನು ಕಾರ್ಟಿಸಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ A 1 x + B 1 y + C 1 = 0 ಮತ್ತು A 2 x + B 2 y + C 2 ಸಾಮಾನ್ಯ ಸಮೀಕರಣಗಳಿಂದ ನಿರ್ದಿಷ್ಟಪಡಿಸಲಿ. = 0. ನಂತರ cos j =  .
.
ವ್ಯಾಯಾಮಗಳು.
1) ನೇರ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು ಸೂತ್ರವನ್ನು ಪಡೆದುಕೊಳ್ಳಿ:
(1) ಎರಡೂ ಸಾಲುಗಳನ್ನು ನಿಯತಾಂಕವಾಗಿ ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗಿದೆ; (2) ಎರಡೂ ಸಾಲುಗಳನ್ನು ಅಂಗೀಕೃತ ಸಮೀಕರಣಗಳಿಂದ ನೀಡಲಾಗಿದೆ; (3) ಒಂದು ಸಾಲನ್ನು ಪ್ಯಾರಾಮೆಟ್ರಿಕ್ ಆಗಿ ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗಿದೆ, ಇನ್ನೊಂದು ಸಾಲನ್ನು ಸಾಮಾನ್ಯ ಸಮೀಕರಣದಿಂದ ನಿರ್ದಿಷ್ಟಪಡಿಸಲಾಗಿದೆ; (4) ಎರಡೂ ಸಾಲುಗಳನ್ನು ಕೋನೀಯ ಗುಣಾಂಕದೊಂದಿಗೆ ಸಮೀಕರಣದಿಂದ ನೀಡಲಾಗುತ್ತದೆ.
2) j ಎಂಬುದು ಸಮತಲದಲ್ಲಿ ಎರಡು ಸರಳ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವಾಗಿರಲಿ, ಮತ್ತು ಈ ಸರಳ ರೇಖೆಗಳನ್ನು ಕಾರ್ಟಿಸಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ y = k 1 x + b 1 ಮತ್ತು y =k 2 x + b 2 ಸಮೀಕರಣಗಳಿಂದ ವ್ಯಾಖ್ಯಾನಿಸೋಣ.
ನಂತರ ತನ್ ಜೆ = .
3) ಕಾರ್ಟೀಸಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಸಾಮಾನ್ಯ ಸಮೀಕರಣಗಳಿಂದ ನೀಡಲಾದ ಎರಡು ಸರಳ ರೇಖೆಗಳ ಸಂಬಂಧಿತ ಸ್ಥಾನವನ್ನು ಅನ್ವೇಷಿಸಿ ಮತ್ತು ಟೇಬಲ್ ಅನ್ನು ಭರ್ತಿ ಮಾಡಿ:
ಸಮತಲದಲ್ಲಿ ಒಂದು ಬಿಂದುವಿನಿಂದ ನೇರ ರೇಖೆಯ ಅಂತರ.
ಕಾರ್ಟೇಶಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಸಮತಲದಲ್ಲಿ ನೇರ ರೇಖೆ l ಅನ್ನು ಸಾಮಾನ್ಯ ಸಮೀಕರಣ Ax + By + C = 0 ಮೂಲಕ ನೀಡೋಣ. M(x 0 , y 0) ಬಿಂದುವಿನಿಂದ ನೇರ ರೇಖೆ l ಗೆ ಅಂತರವನ್ನು ಕಂಡುಹಿಡಿಯೋಣ.
ಪಾಯಿಂಟ್ M ನಿಂದ ನೇರ ರೇಖೆ l ಗೆ ಇರುವ ಅಂತರವು ಲಂಬವಾಗಿರುವ HM (H О l, HM ^ l) ನ ಉದ್ದವಾಗಿದೆ.

l ರೇಖೆಗೆ ವೆಕ್ಟರ್ ಮತ್ತು ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ ಕೋಲಿನಿಯರ್, ಆದ್ದರಿಂದ | | = | | | | ಮತ್ತು | | =
H ಬಿಂದುವಿನ ನಿರ್ದೇಶಾಂಕಗಳು (x,y) ಆಗಿರಲಿ.
ಪಾಯಿಂಟ್ H ಸಾಲಿಗೆ ಸೇರಿರುವುದರಿಂದ l, ನಂತರ Ax + By + C = 0 (*).
ವಾಹಕಗಳ ನಿರ್ದೇಶಾಂಕಗಳು ಮತ್ತು: = (x 0 - x, y 0 - y), = (A, B).
| | = ![]() =
= ![]() =
= ![]()
(C = -Ax - ಮೂಲಕ, ನೋಡಿ (*))
ಪ್ರಮೇಯ.ಕಾರ್ಟೇಶಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ನೇರ ರೇಖೆ l ಅನ್ನು Ax + By + C = 0 ಎಂಬ ಸಾಮಾನ್ಯ ಸಮೀಕರಣದಿಂದ ನಿರ್ದಿಷ್ಟಪಡಿಸಲಿ. ನಂತರ M(x 0 , y 0) ಬಿಂದುವಿನಿಂದ ಈ ಸರಳ ರೇಖೆಯ ಅಂತರವನ್ನು ಸೂತ್ರದಿಂದ ಲೆಕ್ಕಹಾಕಲಾಗುತ್ತದೆ: r ( ಎಂ; ಎಲ್) = ![]() .
.
ವ್ಯಾಯಾಮಗಳು.
1) ಒಂದು ಬಿಂದುವಿನಿಂದ ಸಾಲಿಗೆ ಇರುವ ಅಂತರವನ್ನು ಲೆಕ್ಕಾಚಾರ ಮಾಡಲು ಒಂದು ಸೂತ್ರವನ್ನು ಪಡೆದುಕೊಳ್ಳಿ: (1) ರೇಖೆಯನ್ನು ನಿಯತಾಂಕವಾಗಿ ನೀಡಲಾಗಿದೆ; (2) ಅಂಗೀಕೃತ ಸಮೀಕರಣಗಳಿಗೆ ರೇಖೆಯನ್ನು ನೀಡಲಾಗಿದೆ; (3) ನೇರ ರೇಖೆಯನ್ನು ಕೋನೀಯ ಗುಣಾಂಕದೊಂದಿಗೆ ಸಮೀಕರಣದಿಂದ ನೀಡಲಾಗುತ್ತದೆ.
2) 3x – y = 0 ರೇಖೆಗೆ ವೃತ್ತದ ಸ್ಪರ್ಶದ ಸಮೀಕರಣವನ್ನು ಬರೆಯಿರಿ, Q (-2,4) ಬಿಂದುವಿನಲ್ಲಿ ಕೇಂದ್ರದೊಂದಿಗೆ.
3) 2x + y - 1 = 0 ಮತ್ತು x + y + 1 = 0, ರೇಖೆಗಳ ಛೇದಕದಿಂದ ರೂಪುಗೊಂಡ ಕೋನಗಳನ್ನು ವಿಭಜಿಸುವ ರೇಖೆಗಳ ಸಮೀಕರಣಗಳನ್ನು ಅರ್ಧದಷ್ಟು ಬರೆಯಿರಿ.
§ 27. ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ವಿಮಾನದ ವಿಶ್ಲೇಷಣಾತ್ಮಕ ವ್ಯಾಖ್ಯಾನ
ವ್ಯಾಖ್ಯಾನ. ವಿಮಾನಕ್ಕೆ ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ನಾವು ಶೂನ್ಯವಲ್ಲದ ವೆಕ್ಟರ್ ಎಂದು ಕರೆಯುತ್ತೇವೆ, ಅದರ ಯಾವುದೇ ಪ್ರತಿನಿಧಿಯು ನಿರ್ದಿಷ್ಟ ಸಮತಲಕ್ಕೆ ಲಂಬವಾಗಿರುತ್ತದೆ.
ಕಾಮೆಂಟ್ ಮಾಡಿ.ವೆಕ್ಟರ್ನ ಕನಿಷ್ಠ ಒಂದು ಪ್ರತಿನಿಧಿಯು ಸಮತಲಕ್ಕೆ ಲಂಬವಾಗಿದ್ದರೆ, ವೆಕ್ಟರ್ನ ಎಲ್ಲಾ ಇತರ ಪ್ರತಿನಿಧಿಗಳು ಈ ಸಮತಲಕ್ಕೆ ಲಂಬವಾಗಿರುತ್ತಾರೆ ಎಂಬುದು ಸ್ಪಷ್ಟವಾಗಿದೆ.
ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಕಾರ್ಟೀಸಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯನ್ನು ನೀಡಲಿ.
ಸಮತಲವನ್ನು ನೀಡೋಣ, = (A, B, C) - ಈ ಸಮತಲಕ್ಕೆ ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್, ಪಾಯಿಂಟ್ M (x 0, y 0, z 0) ಸಮತಲ a ಗೆ ಸೇರಿದೆ.

ಸಮತಲದ ಯಾವುದೇ ಬಿಂದುಗಳಿಗೆ N(x, y, z), ವೆಕ್ಟರ್ಗಳು ಮತ್ತು ಆರ್ಥೋಗೋನಲ್, ಅಂದರೆ ಅವುಗಳ ಸ್ಕೇಲಾರ್ ಉತ್ಪನ್ನಶೂನ್ಯಕ್ಕೆ ಸಮ: = 0. ನಿರ್ದೇಶಾಂಕಗಳಲ್ಲಿ ಕೊನೆಯ ಸಮಾನತೆಯನ್ನು ಬರೆಯೋಣ: A(x - x 0) + B(y - y 0) + C(z - z 0) = 0.
ಲೆಟ್ -ಆಕ್ಸ್ 0 - ಬೈ 0 - ಸಿಝ್ 0 = ಡಿ, ನಂತರ ಏಕ್ಸ್ + ಬೈ + ಸಿಝ್ + ಡಿ = 0.
ನಾವು K (x, y) ಬಿಂದುವನ್ನು ತೆಗೆದುಕೊಳ್ಳೋಣ ಅಂದರೆ Ax + By + Cz + D = 0. D = -Ax 0 ರಿಂದ - 0 - Cz 0 ರಿಂದ, ನಂತರ A(x - x 0) + B(y - y 0) + C(z - z 0) = 0.ನಿರ್ದೇಶಿತ ವಿಭಾಗದ ನಿರ್ದೇಶಾಂಕಗಳು = (x - x 0, y - y 0, z - z 0), ಕೊನೆಯ ಸಮಾನತೆ ಎಂದರೆ ^, ಮತ್ತು, ಆದ್ದರಿಂದ, K О a.
ಆದ್ದರಿಂದ, ನಾವು ಈ ಕೆಳಗಿನ ಪ್ರಮೇಯವನ್ನು ಸಾಬೀತುಪಡಿಸಿದ್ದೇವೆ:
ಪ್ರಮೇಯ.ಕಾರ್ಟೇಶಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿರುವ ಯಾವುದೇ ವಿಮಾನವನ್ನು Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 ≠ 0) ರೂಪದ ಸಮೀಕರಣದಿಂದ ನಿರ್ದಿಷ್ಟಪಡಿಸಬಹುದು, ಅಲ್ಲಿ (A, B, C) ಈ ಸಮತಲಕ್ಕೆ ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ನ ನಿರ್ದೇಶಾಂಕಗಳು.
ಇದಕ್ಕೆ ವಿರುದ್ಧವೂ ನಿಜ.
ಪ್ರಮೇಯ.ಕಾರ್ಟೇಶಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 ≠ 0) ರೂಪದ ಯಾವುದೇ ಸಮೀಕರಣವು ಒಂದು ನಿರ್ದಿಷ್ಟ ಸಮತಲವನ್ನು ನಿರ್ದಿಷ್ಟಪಡಿಸುತ್ತದೆ ಮತ್ತು (A, B, C) ಸಾಮಾನ್ಯದ ನಿರ್ದೇಶಾಂಕಗಳಾಗಿವೆ. ಈ ವಿಮಾನಕ್ಕೆ ವೆಕ್ಟರ್.
ಪುರಾವೆ.
Ax 0 + ಮೂಲಕ 0 + Cz 0 + D = 0 ಮತ್ತು ವೆಕ್ಟರ್ = (A, B, C) (≠ q) ಪಾಯಿಂಟ್ M (x 0, y 0, z 0) ತೆಗೆದುಕೊಳ್ಳಿ.
ಒಂದು ಸಮತಲ (ಮತ್ತು ಒಂದೇ ಒಂದು) ವೆಕ್ಟರ್ಗೆ ಲಂಬವಾಗಿರುವ ಪಾಯಿಂಟ್ ಎಂ ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ. ಹಿಂದಿನ ಪ್ರಮೇಯದ ಪ್ರಕಾರ, ಈ ಸಮತಲವನ್ನು Ax + By + Cz + D = 0 ಸಮೀಕರಣದಿಂದ ನೀಡಲಾಗಿದೆ.
ವ್ಯಾಖ್ಯಾನ. Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 ≠ 0) ರೂಪದ ಸಮೀಕರಣವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಸಾಮಾನ್ಯ ಸಮತಲ ಸಮೀಕರಣ.
ಉದಾಹರಣೆ.
M (0,2,4), N (1,-1,0) ಮತ್ತು K (-1,0,5) ಬಿಂದುಗಳ ಮೂಲಕ ಹಾದುಹೋಗುವ ಸಮತಲದ ಸಮೀಕರಣವನ್ನು ಬರೆಯೋಣ.
1. ಸಮತಲಕ್ಕೆ (MNK) ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ನ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಹುಡುಕಿ. ಏಕೆಂದರೆ ವೆಕ್ಟರ್ ಉತ್ಪನ್ನ´ ಕಾಲಿನಿಯರ್ ಅಲ್ಲದ ವಾಹಕಗಳಿಗೆ ಆರ್ಥೋಗೋನಲ್ ಆಗಿದೆ ಮತ್ತು ನಂತರ ವೆಕ್ಟರ್ ಕೊಲಿನಿಯರ್ ಆಗಿದೆ.
= (1, -3, -4), = (-1, -2, 1);
´ =  ,
,
´ = (-11, 3, -5).
ಆದ್ದರಿಂದ, ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ ಆಗಿ ನಾವು ವೆಕ್ಟರ್ = (-11, 3, -5) ಅನ್ನು ತೆಗೆದುಕೊಳ್ಳುತ್ತೇವೆ.
2. ನಾವು ಈಗ ಮೊದಲ ಪ್ರಮೇಯದ ಫಲಿತಾಂಶಗಳನ್ನು ಬಳಸೋಣ:
ಈ ಸಮತಲದ ಸಮೀಕರಣ A(x - x 0) + B(y - y 0) + C(z - z 0) = 0, ಅಲ್ಲಿ (A, B, C) ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ನ ನಿರ್ದೇಶಾಂಕಗಳು, (x 0 , y 0 , z 0) - ಸಮತಲದಲ್ಲಿ ಇರುವ ಬಿಂದುವಿನ ನಿರ್ದೇಶಾಂಕಗಳು (ಉದಾಹರಣೆಗೆ, ಪಾಯಿಂಟ್ M).
11(x - 0) + 3(y - 2) - 5(z - 4) = 0
11x + 3y - 5z + 14 = 0
ಉತ್ತರ: -11x + 3y - 5z + 14 = 0.
ವ್ಯಾಯಾಮಗಳು.
1) ಇದ್ದರೆ ಸಮತಲದ ಸಮೀಕರಣವನ್ನು ಬರೆಯಿರಿ
(1) ಸಮತಲವು 3x + y + z = 0 ಸಮತಲಕ್ಕೆ ಸಮಾನಾಂತರವಾದ M (-2,3,0) ಬಿಂದುವಿನ ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ;
(2) ಸಮತಲವು (ಆಕ್ಸ್) ಅಕ್ಷವನ್ನು ಹೊಂದಿರುತ್ತದೆ ಮತ್ತು x + 2y - 5z + 7 = 0 ಸಮತಲಕ್ಕೆ ಲಂಬವಾಗಿರುತ್ತದೆ.
2) ನೀಡಲಾದ ಮೂರು ಬಿಂದುಗಳ ಮೂಲಕ ಹಾದುಹೋಗುವ ಸಮತಲದ ಸಮೀಕರಣವನ್ನು ಬರೆಯಿರಿ.
§ 28. ಅರ್ಧ-ಸ್ಥಳದ ವಿಶ್ಲೇಷಣಾತ್ಮಕ ವ್ಯಾಖ್ಯಾನ*
ಕಾಮೆಂಟ್*. ಸ್ವಲ್ಪ ವಿಮಾನವನ್ನು ಸರಿಪಡಿಸಲಿ. ಅಡಿಯಲ್ಲಿ ಅರ್ಧ ಜಾಗನಿರ್ದಿಷ್ಟ ಸಮತಲದ ಒಂದು ಬದಿಯಲ್ಲಿ ಇರುವ ಬಿಂದುಗಳ ಗುಂಪನ್ನು ನಾವು ಅರ್ಥಮಾಡಿಕೊಳ್ಳುತ್ತೇವೆ, ಅಂದರೆ, ಅವುಗಳನ್ನು ಸಂಪರ್ಕಿಸುವ ವಿಭಾಗವು ನಿರ್ದಿಷ್ಟ ಸಮತಲವನ್ನು ಛೇದಿಸದಿದ್ದರೆ ಎರಡು ಬಿಂದುಗಳು ಒಂದೇ ಅರ್ಧ ಜಾಗದಲ್ಲಿವೆ. ಈ ವಿಮಾನವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಈ ಅರ್ಧ ಜಾಗದ ಗಡಿ. ಈ ವಿಮಾನ ಮತ್ತು ಅರ್ಧ ಜಾಗದ ಒಕ್ಕೂಟವನ್ನು ಕರೆಯಲಾಗುವುದು ಮುಚ್ಚಿದ ಅರ್ಧ ಜಾಗ.
ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಕಾರ್ಟೀಸಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಸರಿಪಡಿಸಲಿ.
ಪ್ರಮೇಯ. Ax + By + Cz + D = 0 ಎಂಬ ಸಾಮಾನ್ಯ ಸಮೀಕರಣದಿಂದ ಸಮತಲವನ್ನು ನೀಡೋಣ. ನಂತರ ಪ್ಲೇನ್ a ಜಾಗವನ್ನು ವಿಭಜಿಸುವ ಎರಡು ಅರ್ಧ-ಸ್ಥಳಗಳಲ್ಲಿ ಒಂದನ್ನು ಅಸಮಾನತೆಯ Ax + By + Cz + D > 0 ನಿಂದ ನೀಡಲಾಗುತ್ತದೆ. , ಮತ್ತು ಎರಡನೇ ಅರ್ಧ-ಸ್ಪೇಸ್ ಅನ್ನು ಅಸಮಾನತೆಯ Ax + By + Cz + D ಮೂಲಕ ನೀಡಲಾಗುತ್ತದೆ< 0.
ಪುರಾವೆ.
ಈ ಸಮತಲದಲ್ಲಿ ಮಲಗಿರುವ M (x 0, y 0, z 0) ಬಿಂದುವಿನಿಂದ a ಸಮತಲಕ್ಕೆ ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ = (A, B, C) ಅನ್ನು ನಾವು ಯೋಜಿಸೋಣ: = , M О a, MN ^ a. ವಿಮಾನವು ಜಾಗವನ್ನು ಎರಡು ಅರ್ಧ-ಸ್ಥಳಗಳಾಗಿ ವಿಭಜಿಸುತ್ತದೆ: ಬಿ 1 ಮತ್ತು ಬಿ 2. ಪಾಯಿಂಟ್ N ಈ ಅರ್ಧ-ಸ್ಥಳಗಳಲ್ಲಿ ಒಂದಕ್ಕೆ ಸೇರಿದೆ ಎಂಬುದು ಸ್ಪಷ್ಟವಾಗಿದೆ. ಸಾಮಾನ್ಯತೆಯ ನಷ್ಟವಿಲ್ಲದೆ, ನಾವು N О b 1 ಎಂದು ಭಾವಿಸುತ್ತೇವೆ.

ಅರ್ಧ-ಸ್ಪೇಸ್ b 1 ಅನ್ನು ಅಸಮಾನತೆಯ Ax + By + Cz + D > 0 ನಿಂದ ವ್ಯಾಖ್ಯಾನಿಸಲಾಗಿದೆ ಎಂದು ನಾವು ಸಾಬೀತುಪಡಿಸೋಣ.
1) ಅರ್ಧ-ಸ್ಥಳ ಬಿ 1 ನಲ್ಲಿ K(x,y,z) ಬಿಂದುವನ್ನು ತೆಗೆದುಕೊಳ್ಳಿ. ಕೋನ Ð NMK ವೆಕ್ಟರ್ಗಳ ನಡುವಿನ ಕೋನ ಮತ್ತು - ತೀವ್ರ, ಆದ್ದರಿಂದ ಈ ವೆಕ್ಟರ್ಗಳ ಸ್ಕೇಲಾರ್ ಉತ್ಪನ್ನವು ಧನಾತ್ಮಕವಾಗಿರುತ್ತದೆ: > 0. ಈ ಅಸಮಾನತೆಯನ್ನು ನಿರ್ದೇಶಾಂಕಗಳಲ್ಲಿ ಬರೆಯೋಣ: A(x - x 0) + B(y - y 0) + C(z - z 0) > 0, ಅಂದರೆ, Ax + By + Cy - Ax 0 - ಬೈ 0 - C z 0 > 0.
M О b 1 ರಿಂದ, ನಂತರ Ax 0 + By 0 + C z 0 + D = 0, ಆದ್ದರಿಂದ -Ax 0 - 0 - C z 0 = D. ಆದ್ದರಿಂದ, ಕೊನೆಯ ಅಸಮಾನತೆಯನ್ನು ಈ ಕೆಳಗಿನಂತೆ ಬರೆಯಬಹುದು: Ax + By + Cz + D > 0.
2) Ax + By + Cz + D > 0 ಪಾಯಿಂಟ್ L(x,y) ಅನ್ನು ತೆಗೆದುಕೊಳ್ಳಿ.
D ಅನ್ನು (-Ax 0 - 0 - C z 0 ಮೂಲಕ) ಬದಲಾಯಿಸುವ ಮೂಲಕ ಅಸಮಾನತೆಯನ್ನು ಪುನಃ ಬರೆಯೋಣ (M О b 1 ರಿಂದ, Ax 0 + By 0 + C z 0 + D = 0): A(x - x 0) + B(y - y 0) + C(z - z 0) > 0.
ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಹೊಂದಿರುವ ವೆಕ್ಟರ್ (x - x 0,y - y 0, z - z 0) ಒಂದು ವೆಕ್ಟರ್ ಆಗಿದೆ, ಆದ್ದರಿಂದ ಅಭಿವ್ಯಕ್ತಿ A(x - x 0) + B(y - y 0) + C(z - z 0) ವಾಹಕಗಳ ಸ್ಕೇಲಾರ್ ಉತ್ಪನ್ನವಾಗಿ ಅರ್ಥೈಸಿಕೊಳ್ಳಬಹುದು ಮತ್ತು . ವಾಹಕಗಳ ಸ್ಕೇಲಾರ್ ಉತ್ಪನ್ನ ಮತ್ತು ಧನಾತ್ಮಕವಾಗಿರುವುದರಿಂದ, ಅವುಗಳ ನಡುವಿನ ಕೋನವು ತೀವ್ರವಾಗಿರುತ್ತದೆ ಮತ್ತು ಪಾಯಿಂಟ್ L О b 1 .
ಅಂತೆಯೇ, ಅರ್ಧ-ಸ್ಪೇಸ್ b 2 ಅನ್ನು ಅಸಮಾನತೆಯ Ax + By + Cz + D ನಿಂದ ನೀಡಲಾಗಿದೆ ಎಂದು ನಾವು ಸಾಬೀತುಪಡಿಸಬಹುದು< 0.
ಟಿಪ್ಪಣಿಗಳು.
1) ಮೇಲೆ ನೀಡಲಾದ ಪುರಾವೆಯು ಸಮತಲದಲ್ಲಿ M ಬಿಂದುವಿನ ಆಯ್ಕೆಯ ಮೇಲೆ ಅವಲಂಬಿತವಾಗಿಲ್ಲ ಎಂಬುದು ಸ್ಪಷ್ಟವಾಗಿದೆ a.
2) ಒಂದೇ ಅರ್ಧ-ಸ್ಥಳವನ್ನು ವಿಭಿನ್ನ ಅಸಮಾನತೆಗಳಿಂದ ವ್ಯಾಖ್ಯಾನಿಸಬಹುದು ಎಂಬುದು ಸ್ಪಷ್ಟವಾಗಿದೆ.
ಇದಕ್ಕೆ ವಿರುದ್ಧವೂ ನಿಜ.
ಪ್ರಮೇಯ. Ax + By + Cz + D > 0 (ಅಥವಾ Ax + By + Cz + D) ರೂಪದ ಯಾವುದೇ ರೇಖೀಯ ಅಸಮಾನತೆ< 0) (A 2 + B 2 + C 2 ≠ 0) задает в пространстве в декартовой системе координат полупространство с границей Ax + By + Cz + D = 0.
ಪುರಾವೆ.
ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ Ax + By + Cz + D = 0 (A 2 + B 2 + C 2 ≠ 0) ಸಮೀಕರಣವು ನಿರ್ದಿಷ್ಟ ಸಮತಲವನ್ನು ವ್ಯಾಖ್ಯಾನಿಸುತ್ತದೆ a (ನೋಡಿ § ...). ಹಿಂದಿನ ಪ್ರಮೇಯದಲ್ಲಿ ಸಾಬೀತಾಗಿರುವಂತೆ, ಸಮತಲವು ಜಾಗವನ್ನು ವಿಭಜಿಸುವ ಎರಡು ಅರ್ಧ-ಸ್ಥಳಗಳಲ್ಲಿ ಒಂದನ್ನು ಅಸಮಾನತೆಯ Ax Ax + By + Cz + D > 0 ನಿಂದ ನೀಡಲಾಗುತ್ತದೆ.
ಟಿಪ್ಪಣಿಗಳು.
1) ಮುಚ್ಚಿದ ಅರ್ಧ-ಸ್ಥಳವನ್ನು ಕಟ್ಟುನಿಟ್ಟಾಗಿರದ ರೇಖೀಯ ಅಸಮಾನತೆಯಿಂದ ವ್ಯಾಖ್ಯಾನಿಸಬಹುದು ಮತ್ತು ಕಾರ್ಟೇಶಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಯಾವುದೇ ಕಟ್ಟುನಿಟ್ಟಿಲ್ಲದ ರೇಖೀಯ ಅಸಮಾನತೆಯು ಮುಚ್ಚಿದ ಅರ್ಧ-ಜಾಗವನ್ನು ವ್ಯಾಖ್ಯಾನಿಸುತ್ತದೆ ಎಂಬುದು ಸ್ಪಷ್ಟವಾಗಿದೆ.
2) ಯಾವುದೇ ಪೀನದ ಪಾಲಿಹೆಡ್ರನ್ ಅನ್ನು ಮುಚ್ಚಿದ ಅರ್ಧ-ಸ್ಥಳಗಳ ಛೇದಕ ಎಂದು ವ್ಯಾಖ್ಯಾನಿಸಬಹುದು (ಇವುಗಳ ಗಡಿಗಳು ಪಾಲಿಹೆಡ್ರನ್ನ ಮುಖಗಳನ್ನು ಹೊಂದಿರುವ ವಿಮಾನಗಳು), ಅಂದರೆ, ವಿಶ್ಲೇಷಣಾತ್ಮಕವಾಗಿ - ರೇಖೀಯ ಅಲ್ಲದ ಕಟ್ಟುನಿಟ್ಟಾದ ಅಸಮಾನತೆಗಳ ವ್ಯವಸ್ಥೆಯಿಂದ.
ವ್ಯಾಯಾಮಗಳು.
1) ಅನಿಯಂತ್ರಿತ ಅಫೈನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಗಾಗಿ ಪ್ರಸ್ತುತಪಡಿಸಲಾದ ಎರಡು ಪ್ರಮೇಯಗಳನ್ನು ಸಾಬೀತುಪಡಿಸಿ.
2) ವ್ಯತಿರಿಕ್ತವಾದ ಯಾವುದೇ ವ್ಯವಸ್ಥೆಯು ಕಟ್ಟುನಿಟ್ಟಾಗಿಲ್ಲ ಎಂಬುದು ನಿಜವೇ ರೇಖೀಯ ಅಸಮಾನತೆಗಳುಪೀನ ಬಹುಭುಜಾಕೃತಿಯನ್ನು ವ್ಯಾಖ್ಯಾನಿಸುತ್ತದೆ?
ವ್ಯಾಯಾಮ.1) ಕಾರ್ಟೀಸಿಯನ್ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯಲ್ಲಿ ಸಾಮಾನ್ಯ ಸಮೀಕರಣಗಳಿಂದ ವ್ಯಾಖ್ಯಾನಿಸಲಾದ ಎರಡು ವಿಮಾನಗಳ ಸಂಬಂಧಿತ ಸ್ಥಾನಗಳನ್ನು ತನಿಖೆ ಮಾಡಿ ಮತ್ತು ಟೇಬಲ್ ಅನ್ನು ಭರ್ತಿ ಮಾಡಿ.
ನಾನು ಸಂಕ್ಷಿಪ್ತವಾಗಿ ಹೇಳುತ್ತೇನೆ. ಎರಡು ನೇರ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನ ಕೋನಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆಅವುಗಳ ದಿಕ್ಕಿನ ವಾಹಕಗಳ ನಡುವೆ. ಹೀಗಾಗಿ, ದಿಕ್ಕಿನ ವಾಹಕಗಳ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಕಂಡುಹಿಡಿಯಲು ನೀವು ನಿರ್ವಹಿಸಿದರೆ a = (x 1; y 1; z 1) ಮತ್ತು b = (x 2; y 2; z 2), ನಂತರ ನೀವು ಕೋನವನ್ನು ಕಂಡುಹಿಡಿಯಬಹುದು. ಹೆಚ್ಚು ನಿಖರವಾಗಿ, ಸೂತ್ರದ ಪ್ರಕಾರ ಕೋನದ ಕೊಸೈನ್:
ನಿರ್ದಿಷ್ಟ ಉದಾಹರಣೆಗಳನ್ನು ಬಳಸಿಕೊಂಡು ಈ ಸೂತ್ರವು ಹೇಗೆ ಕಾರ್ಯನಿರ್ವಹಿಸುತ್ತದೆ ಎಂಬುದನ್ನು ನೋಡೋಣ:
ಕಾರ್ಯ. ABCDA 1 B 1 C 1 D 1 ಘನದಲ್ಲಿ, E ಮತ್ತು F ಅಂಕಗಳನ್ನು ಗುರುತಿಸಲಾಗಿದೆ - ಕ್ರಮವಾಗಿ A 1 B 1 ಮತ್ತು B 1 C 1 ಅಂಚುಗಳ ಮಧ್ಯಬಿಂದುಗಳು. AE ಮತ್ತು BF ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವನ್ನು ಹುಡುಕಿ.

ಘನದ ಅಂಚನ್ನು ನಿರ್ದಿಷ್ಟಪಡಿಸದ ಕಾರಣ, ನಾವು AB = 1 ಅನ್ನು ಹೊಂದಿಸೋಣ. ನಾವು ಪ್ರಮಾಣಿತ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಪರಿಚಯಿಸುತ್ತೇವೆ: ಮೂಲವು A ಹಂತದಲ್ಲಿದೆ, x, y, z ಅಕ್ಷಗಳು ಕ್ರಮವಾಗಿ AB, AD ಮತ್ತು AA 1 ರ ಉದ್ದಕ್ಕೂ ನಿರ್ದೇಶಿಸಲ್ಪಡುತ್ತವೆ. ಯುನಿಟ್ ವಿಭಾಗವು AB = 1 ಗೆ ಸಮನಾಗಿರುತ್ತದೆ. ಈಗ ನಮ್ಮ ಸಾಲುಗಳಿಗೆ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ಗಳ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಕಂಡುಹಿಡಿಯೋಣ.
ವೆಕ್ಟರ್ AE ನ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಕಂಡುಹಿಡಿಯೋಣ. ಇದಕ್ಕಾಗಿ ನಮಗೆ A = (0; 0; 0) ಮತ್ತು E = (0.5; 0; 1) ಅಂಕಗಳು ಬೇಕಾಗುತ್ತವೆ. ಪಾಯಿಂಟ್ ಇ ಎ 1 ಬಿ 1 ವಿಭಾಗದ ಮಧ್ಯವಾಗಿರುವುದರಿಂದ, ಅದರ ನಿರ್ದೇಶಾಂಕಗಳು ತುದಿಗಳ ನಿರ್ದೇಶಾಂಕಗಳ ಅಂಕಗಣಿತದ ಸರಾಸರಿಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ವೆಕ್ಟರ್ AE ಯ ಮೂಲವು ನಿರ್ದೇಶಾಂಕಗಳ ಮೂಲದೊಂದಿಗೆ ಸೇರಿಕೊಳ್ಳುತ್ತದೆ ಎಂಬುದನ್ನು ಗಮನಿಸಿ, ಆದ್ದರಿಂದ AE = (0.5; 0; 1).
ಈಗ BF ವೆಕ್ಟರ್ ಅನ್ನು ನೋಡೋಣ. ಅಂತೆಯೇ, ನಾವು ಬಿ = (1; 0; 0) ಮತ್ತು ಎಫ್ = (1; 0.5; 1) ಅಂಕಗಳನ್ನು ವಿಶ್ಲೇಷಿಸುತ್ತೇವೆ, ಏಕೆಂದರೆ ಎಫ್ ಬಿ 1 ಸಿ 1 ವಿಭಾಗದ ಮಧ್ಯಭಾಗವಾಗಿದೆ. ನಾವು ಹೊಂದಿದ್ದೇವೆ:
BF = (1 - 1; 0.5 - 0; 1 - 0) = (0; 0.5; 1).
ಆದ್ದರಿಂದ, ದಿಕ್ಕಿನ ವಾಹಕಗಳು ಸಿದ್ಧವಾಗಿವೆ. ನೇರ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನದ ಕೊಸೈನ್ ದಿಕ್ಕಿನ ವಾಹಕಗಳ ನಡುವಿನ ಕೋನದ ಕೊಸೈನ್ ಆಗಿದೆ, ಆದ್ದರಿಂದ ನಾವು ಹೊಂದಿದ್ದೇವೆ:
ಕಾರ್ಯ. ನಿಯಮಿತ ತ್ರಿಕೋನ ಪ್ರಿಸ್ಮ್ ABCA 1 B 1 C 1 ನಲ್ಲಿ, ಅದರ ಎಲ್ಲಾ ಅಂಚುಗಳು 1 ಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, D ಮತ್ತು E ಅಂಕಗಳನ್ನು ಗುರುತಿಸಲಾಗಿದೆ - ಕ್ರಮವಾಗಿ A 1 B 1 ಮತ್ತು B 1 C 1 ಅಂಚುಗಳ ಮಧ್ಯಬಿಂದುಗಳು. AD ಮತ್ತು BE ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವನ್ನು ಹುಡುಕಿ.

ಪ್ರಮಾಣಿತ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಪರಿಚಯಿಸೋಣ: ಮೂಲವು A ಹಂತದಲ್ಲಿದೆ, x ಅಕ್ಷವನ್ನು AB, z - AA 1 ಉದ್ದಕ್ಕೂ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ. y-ಅಕ್ಷವನ್ನು ನಿರ್ದೇಶಿಸೋಣ ಇದರಿಂದ OXY ಪ್ಲೇನ್ ABC ಪ್ಲೇನ್ನೊಂದಿಗೆ ಸೇರಿಕೊಳ್ಳುತ್ತದೆ. ಯುನಿಟ್ ವಿಭಾಗವು AB = 1 ಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ. ಅಗತ್ಯವಿರುವ ರೇಖೆಗಳಿಗೆ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ಗಳ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಕಂಡುಹಿಡಿಯೋಣ.
ಮೊದಲಿಗೆ, ವೆಕ್ಟರ್ AD ಯ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಕಂಡುಹಿಡಿಯೋಣ. ಅಂಕಗಳನ್ನು ಪರಿಗಣಿಸಿ: A = (0; 0; 0) ಮತ್ತು D = (0.5; 0; 1), ಏಕೆಂದರೆ ಡಿ - ಎ 1 ಬಿ 1 ವಿಭಾಗದ ಮಧ್ಯಭಾಗ. ವೆಕ್ಟರ್ AD ಯ ಆರಂಭವು ನಿರ್ದೇಶಾಂಕಗಳ ಮೂಲದೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುವುದರಿಂದ, ನಾವು AD = (0.5; 0; 1) ಅನ್ನು ಪಡೆಯುತ್ತೇವೆ.
ಈಗ ವೆಕ್ಟರ್ BE ನ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಕಂಡುಹಿಡಿಯೋಣ. ಪಾಯಿಂಟ್ ಬಿ = (1; 0; 0) ಲೆಕ್ಕಾಚಾರ ಮಾಡುವುದು ಸುಲಭ. ಪಾಯಿಂಟ್ ಇ ಜೊತೆ - ವಿಭಾಗದ ಮಧ್ಯದಲ್ಲಿ ಸಿ 1 ಬಿ 1 - ಇದು ಸ್ವಲ್ಪ ಹೆಚ್ಚು ಸಂಕೀರ್ಣವಾಗಿದೆ. ನಾವು ಹೊಂದಿದ್ದೇವೆ:
ಕೋನದ ಕೊಸೈನ್ ಅನ್ನು ಕಂಡುಹಿಡಿಯಲು ಇದು ಉಳಿದಿದೆ:

ಕಾರ್ಯ. ನಿಯಮಿತ ಷಡ್ಭುಜೀಯ ಪ್ರಿಸ್ಮ್ನಲ್ಲಿ ABCDEFA 1 B 1 C 1 D 1 E 1 F 1 , ಅದರ ಎಲ್ಲಾ ಅಂಚುಗಳು 1 ಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, K ಮತ್ತು L ಅಂಕಗಳನ್ನು ಗುರುತಿಸಲಾಗಿದೆ - ಕ್ರಮವಾಗಿ A 1 B 1 ಮತ್ತು B 1 C 1 ಅಂಚುಗಳ ಮಧ್ಯಬಿಂದುಗಳು . AK ಮತ್ತು BL ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವನ್ನು ಹುಡುಕಿ.

ನಾವು ಪ್ರಿಸ್ಮ್ಗಾಗಿ ಪ್ರಮಾಣಿತ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಪರಿಚಯಿಸೋಣ: ನಾವು ನಿರ್ದೇಶಾಂಕಗಳ ಮೂಲವನ್ನು ಕೆಳಗಿನ ತಳದ ಮಧ್ಯದಲ್ಲಿ ಇರಿಸುತ್ತೇವೆ, x ಅಕ್ಷವನ್ನು FC ಉದ್ದಕ್ಕೂ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ, y ಅಕ್ಷವನ್ನು AB ಮತ್ತು DE ವಿಭಾಗಗಳ ಮಧ್ಯಬಿಂದುಗಳ ಮೂಲಕ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ ಮತ್ತು z ಅಕ್ಷವನ್ನು ಲಂಬವಾಗಿ ಮೇಲಕ್ಕೆ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ. ಯುನಿಟ್ ವಿಭಾಗವು ಮತ್ತೊಮ್ಮೆ AB = 1 ಗೆ ಸಮನಾಗಿರುತ್ತದೆ. ನಮಗೆ ಆಸಕ್ತಿಯ ಬಿಂದುಗಳ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಬರೆಯೋಣ:

K ಮತ್ತು L ಅಂಕಗಳು ಕ್ರಮವಾಗಿ A 1 B 1 ಮತ್ತು B 1 C 1 ವಿಭಾಗಗಳ ಮಧ್ಯಬಿಂದುಗಳಾಗಿವೆ, ಆದ್ದರಿಂದ ಅವುಗಳ ನಿರ್ದೇಶಾಂಕಗಳು ಅಂಕಗಣಿತದ ಸರಾಸರಿ ಮೂಲಕ ಕಂಡುಬರುತ್ತವೆ. ಬಿಂದುಗಳನ್ನು ತಿಳಿದುಕೊಳ್ಳುವುದರಿಂದ, ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ಗಳಾದ ಎಕೆ ಮತ್ತು ಬಿಎಲ್ಗಳ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ನಾವು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ:
ಈಗ ಕೋನದ ಕೊಸೈನ್ ಅನ್ನು ಕಂಡುಹಿಡಿಯೋಣ:

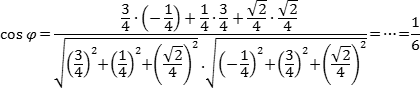
ಕಾರ್ಯ. ಬಲಭಾಗದಲ್ಲಿ ಚತುರ್ಭುಜ ಪಿರಮಿಡ್ SABCD, ಅದರ ಎಲ್ಲಾ ಅಂಚುಗಳು 1 ಕ್ಕೆ ಸಮಾನವಾಗಿರುತ್ತದೆ, E ಮತ್ತು F ಅಂಕಗಳನ್ನು ಗುರುತಿಸಲಾಗಿದೆ - ಕ್ರಮವಾಗಿ SB ಮತ್ತು SC ಬದಿಗಳ ಮಧ್ಯಬಿಂದುಗಳು. AE ಮತ್ತು BF ರೇಖೆಗಳ ನಡುವಿನ ಕೋನವನ್ನು ಹುಡುಕಿ.
ಪ್ರಮಾಣಿತ ನಿರ್ದೇಶಾಂಕ ವ್ಯವಸ್ಥೆಯನ್ನು ಪರಿಚಯಿಸೋಣ: ಮೂಲವು A ಹಂತದಲ್ಲಿದೆ, x ಮತ್ತು y ಅಕ್ಷಗಳನ್ನು ಕ್ರಮವಾಗಿ AB ಮತ್ತು AD ಯ ಉದ್ದಕ್ಕೂ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ ಮತ್ತು z ಅಕ್ಷವನ್ನು ಲಂಬವಾಗಿ ಮೇಲಕ್ಕೆ ನಿರ್ದೇಶಿಸಲಾಗುತ್ತದೆ. ಯುನಿಟ್ ವಿಭಾಗವು AB = 1 ಗೆ ಸಮಾನವಾಗಿರುತ್ತದೆ.
E ಮತ್ತು F ಅಂಕಗಳು ಕ್ರಮವಾಗಿ SB ಮತ್ತು SC ವಿಭಾಗಗಳ ಮಧ್ಯಬಿಂದುಗಳಾಗಿವೆ, ಆದ್ದರಿಂದ ಅವುಗಳ ನಿರ್ದೇಶಾಂಕಗಳು ತುದಿಗಳ ಅಂಕಗಣಿತದ ಸರಾಸರಿಯಾಗಿ ಕಂಡುಬರುತ್ತವೆ. ನಮಗೆ ಆಸಕ್ತಿಯಿರುವ ಅಂಶಗಳ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಬರೆಯೋಣ:
A = (0; 0; 0); ಬಿ = (1; 0; 0)
ಬಿಂದುಗಳನ್ನು ತಿಳಿದುಕೊಳ್ಳುವುದರಿಂದ, ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ AE ಮತ್ತು BF ನ ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ನಾವು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ:
ವೆಕ್ಟರ್ AE ಯ ನಿರ್ದೇಶಾಂಕಗಳು ಪಾಯಿಂಟ್ E ನ ನಿರ್ದೇಶಾಂಕಗಳೊಂದಿಗೆ ಹೊಂದಿಕೆಯಾಗುತ್ತವೆ, ಏಕೆಂದರೆ ಪಾಯಿಂಟ್ A ಮೂಲವಾಗಿದೆ. ಕೋನದ ಕೊಸೈನ್ ಅನ್ನು ಕಂಡುಹಿಡಿಯಲು ಇದು ಉಳಿದಿದೆ:
ವಿಮಾನಗಳ ನಡುವಿನ ಕೋನ
ಎರಡು ಸಮತಲಗಳನ್ನು ಪರಿಗಣಿಸಿ α 1 ಮತ್ತು α 2, ಕ್ರಮವಾಗಿ ಸಮೀಕರಣಗಳಿಂದ ವ್ಯಾಖ್ಯಾನಿಸಲಾಗಿದೆ:
ಅಡಿಯಲ್ಲಿ ಕೋನಎರಡು ಸಮತಲಗಳ ನಡುವೆ ಈ ವಿಮಾನಗಳಿಂದ ರೂಪುಗೊಂಡ ಡೈಹೆಡ್ರಲ್ ಕೋನಗಳಲ್ಲಿ ಒಂದನ್ನು ನಾವು ಅರ್ಥಮಾಡಿಕೊಳ್ಳುತ್ತೇವೆ. ಸಾಮಾನ್ಯ ವಾಹಕಗಳು ಮತ್ತು ವಿಮಾನಗಳು α 1 ಮತ್ತು α 2 ನಡುವಿನ ಕೋನವು ಸೂಚಿಸಲಾದ ಪಕ್ಕದ ಡೈಹೆಡ್ರಲ್ ಕೋನಗಳಲ್ಲಿ ಒಂದಕ್ಕೆ ಸಮನಾಗಿರುತ್ತದೆ ಅಥವಾ ![]() . ಅದಕ್ಕೇ
. ಅದಕ್ಕೇ  . ಏಕೆಂದರೆ
. ಏಕೆಂದರೆ ![]() ಮತ್ತು
ಮತ್ತು ![]() , ಅದು
, ಅದು
 .
.
ಉದಾಹರಣೆ.ವಿಮಾನಗಳ ನಡುವಿನ ಕೋನವನ್ನು ನಿರ್ಧರಿಸಿ X+2ವೈ-3z+4=0 ಮತ್ತು 2 X+3ವೈ+z+8=0.
![]()
ಎರಡು ವಿಮಾನಗಳ ಸಮಾನಾಂತರತೆಯ ಸ್ಥಿತಿ.
ಎರಡು ವಿಮಾನಗಳು α 1 ಮತ್ತು α 2 ಸಮಾನಾಂತರವಾಗಿರುತ್ತವೆ ಮತ್ತು ಅವುಗಳ ಸಾಮಾನ್ಯ ವಾಹಕಗಳು ಸಮಾನಾಂತರವಾಗಿದ್ದರೆ ಮತ್ತು ಆದ್ದರಿಂದ ![]() .
.
ಆದ್ದರಿಂದ, ಅನುಗುಣವಾದ ನಿರ್ದೇಶಾಂಕಗಳ ಗುಣಾಂಕಗಳು ಪ್ರಮಾಣಾನುಗುಣವಾಗಿದ್ದರೆ ಮಾತ್ರ ಎರಡು ವಿಮಾನಗಳು ಪರಸ್ಪರ ಸಮಾನಾಂತರವಾಗಿರುತ್ತವೆ:
![]() ಅಥವಾ
ಅಥವಾ
ವಿಮಾನಗಳ ಲಂಬತೆಯ ಸ್ಥಿತಿ.
ಎರಡು ವಿಮಾನಗಳು ಲಂಬವಾಗಿರುತ್ತವೆ ಮತ್ತು ಅವುಗಳ ಸಾಮಾನ್ಯ ವಾಹಕಗಳು ಲಂಬವಾಗಿದ್ದರೆ ಮಾತ್ರ, ಮತ್ತು ಆದ್ದರಿಂದ, ಅಥವಾ .
ಹೀಗಾಗಿ, .
ಉದಾಹರಣೆಗಳು.
ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ನೇರವಾಗಿ.
ಒಂದು ಲೈನ್ಗಾಗಿ ವೆಕ್ಟರ್ ಸಮೀಕರಣ.
ಪ್ಯಾರಾಮೆಟ್ರಿಕ್ ನೇರ ಸಮೀಕರಣಗಳು
ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ರೇಖೆಯ ಸ್ಥಾನವನ್ನು ಅದರ ಯಾವುದೇ ಸ್ಥಿರ ಬಿಂದುಗಳನ್ನು ಸೂಚಿಸುವ ಮೂಲಕ ಸಂಪೂರ್ಣವಾಗಿ ನಿರ್ಧರಿಸಲಾಗುತ್ತದೆ ಎಂ 1 ಮತ್ತು ಈ ಸಾಲಿಗೆ ಸಮಾನಾಂತರವಾದ ವೆಕ್ಟರ್.
ರೇಖೆಗೆ ಸಮಾನಾಂತರವಾಗಿರುವ ವೆಕ್ಟರ್ ಅನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಮಾರ್ಗದರ್ಶಿಗಳುಈ ಸಾಲಿನ ವೆಕ್ಟರ್.
ಆದ್ದರಿಂದ ನೇರ ರೇಖೆಯನ್ನು ಬಿಡಿ ಎಲ್ಒಂದು ಬಿಂದುವಿನ ಮೂಲಕ ಹಾದುಹೋಗುತ್ತದೆ ಎಂ 1 (X 1 , ವೈ 1 , z 1), ವೆಕ್ಟರ್ಗೆ ಸಮಾನಾಂತರವಾಗಿರುವ ರೇಖೆಯ ಮೇಲೆ ಮಲಗಿರುತ್ತದೆ.
ಅನಿಯಂತ್ರಿತ ಬಿಂದುವನ್ನು ಪರಿಗಣಿಸಿ M(x,y,z)ನೇರ ಸಾಲಿನಲ್ಲಿ. ಆಕೃತಿಯಿಂದ ಅದು ಸ್ಪಷ್ಟವಾಗುತ್ತದೆ ![]() .
.
ವಾಹಕಗಳು ಮತ್ತು ಕಾಲಿನಿಯರ್, ಆದ್ದರಿಂದ ಅಂತಹ ಸಂಖ್ಯೆ ಇದೆ ಟಿ, ಏನು , ಗುಣಕ ಎಲ್ಲಿದೆ ಟಿಯಾವುದನ್ನಾದರೂ ಸ್ವೀಕರಿಸಬಹುದು ಸಂಖ್ಯಾ ಮೌಲ್ಯಬಿಂದುವಿನ ಸ್ಥಾನವನ್ನು ಅವಲಂಬಿಸಿ ಎಂನೇರ ಸಾಲಿನಲ್ಲಿ. ಅಂಶ ಟಿಪ್ಯಾರಾಮೀಟರ್ ಎಂದು ಕರೆಯಲಾಗುತ್ತದೆ. ಬಿಂದುಗಳ ತ್ರಿಜ್ಯದ ವಾಹಕಗಳನ್ನು ಗೊತ್ತುಪಡಿಸಿದ ನಂತರ ಎಂ 1 ಮತ್ತು ಎಂಕ್ರಮವಾಗಿ, ಮೂಲಕ ಮತ್ತು , ನಾವು ಪಡೆಯುತ್ತೇವೆ . ಈ ಸಮೀಕರಣವನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ವೆಕ್ಟರ್ನೇರ ರೇಖೆಯ ಸಮೀಕರಣ. ಪ್ರತಿ ಪ್ಯಾರಾಮೀಟರ್ ಮೌಲ್ಯಕ್ಕೆ ಇದು ತೋರಿಸುತ್ತದೆ ಟಿಕೆಲವು ಬಿಂದುವಿನ ತ್ರಿಜ್ಯದ ವೆಕ್ಟರ್ಗೆ ಅನುರೂಪವಾಗಿದೆ ಎಂ, ನೇರ ರೇಖೆಯ ಮೇಲೆ ಮಲಗಿರುವುದು.
ಈ ಸಮೀಕರಣವನ್ನು ನಿರ್ದೇಶಾಂಕ ರೂಪದಲ್ಲಿ ಬರೆಯೋಣ. ಅದನ್ನು ಗಮನಿಸು , ![]() ಮತ್ತು ಇಲ್ಲಿಂದ
ಮತ್ತು ಇಲ್ಲಿಂದ
ಪರಿಣಾಮವಾಗಿ ಸಮೀಕರಣಗಳನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಪ್ಯಾರಾಮೆಟ್ರಿಕ್ನೇರ ರೇಖೆಯ ಸಮೀಕರಣಗಳು.
ನಿಯತಾಂಕವನ್ನು ಬದಲಾಯಿಸುವಾಗ ಟಿನಿರ್ದೇಶಾಂಕ ಬದಲಾವಣೆ X, ವೈಮತ್ತು zಮತ್ತು ಅವಧಿ ಎಂನೇರ ಸಾಲಿನಲ್ಲಿ ಚಲಿಸುತ್ತದೆ.
ನೇರವಾದ ಅಂಗೀಕೃತ ಸಮೀಕರಣಗಳು
ಅವಕಾಶ ಎಂ 1 (X 1 , ವೈ 1 , z 1) - ಸರಳ ರೇಖೆಯ ಮೇಲೆ ಇರುವ ಬಿಂದು ಎಲ್, ಮತ್ತು ![]() ಅದರ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ ಆಗಿದೆ. ನಾವು ಮತ್ತೆ ಸಾಲಿನಲ್ಲಿ ಅನಿಯಂತ್ರಿತ ಬಿಂದುವನ್ನು ತೆಗೆದುಕೊಳ್ಳೋಣ M(x,y,z)ಮತ್ತು ವೆಕ್ಟರ್ ಅನ್ನು ಪರಿಗಣಿಸಿ.
ಅದರ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ ಆಗಿದೆ. ನಾವು ಮತ್ತೆ ಸಾಲಿನಲ್ಲಿ ಅನಿಯಂತ್ರಿತ ಬಿಂದುವನ್ನು ತೆಗೆದುಕೊಳ್ಳೋಣ M(x,y,z)ಮತ್ತು ವೆಕ್ಟರ್ ಅನ್ನು ಪರಿಗಣಿಸಿ.
ವಾಹಕಗಳು ಸಹ ಕಾಲಿನಿಯರ್ ಆಗಿರುತ್ತವೆ ಎಂಬುದು ಸ್ಪಷ್ಟವಾಗಿದೆ, ಆದ್ದರಿಂದ ಅವುಗಳ ಅನುಗುಣವಾದ ನಿರ್ದೇಶಾಂಕಗಳು ಅನುಪಾತದಲ್ಲಿರಬೇಕು, ಆದ್ದರಿಂದ,
![]() – ಅಂಗೀಕೃತನೇರ ರೇಖೆಯ ಸಮೀಕರಣಗಳು.
– ಅಂಗೀಕೃತನೇರ ರೇಖೆಯ ಸಮೀಕರಣಗಳು.
ಗಮನಿಸಿ 1.ನಿಯತಾಂಕವನ್ನು ತೆಗೆದುಹಾಕುವ ಮೂಲಕ ಪ್ಯಾರಾಮೆಟ್ರಿಕ್ ಪದಗಳಿಗಿಂತ ರೇಖೆಯ ಅಂಗೀಕೃತ ಸಮೀಕರಣಗಳನ್ನು ಪಡೆಯಬಹುದು ಎಂಬುದನ್ನು ಗಮನಿಸಿ ಟಿ. ವಾಸ್ತವವಾಗಿ, ನಾವು ಪಡೆಯುವ ಪ್ಯಾರಾಮೆಟ್ರಿಕ್ ಸಮೀಕರಣಗಳಿಂದ ![]() ಅಥವಾ
ಅಥವಾ ![]() .
.
ಉದಾಹರಣೆ.ರೇಖೆಯ ಸಮೀಕರಣವನ್ನು ಬರೆಯಿರಿ ![]() ಪ್ಯಾರಾಮೆಟ್ರಿಕ್ ರೂಪದಲ್ಲಿ.
ಪ್ಯಾರಾಮೆಟ್ರಿಕ್ ರೂಪದಲ್ಲಿ.
ಸೂಚಿಸೋಣ ![]() , ಇಲ್ಲಿಂದ X = 2 + 3ಟಿ, ವೈ = –1 + 2ಟಿ, z = 1 –ಟಿ.
, ಇಲ್ಲಿಂದ X = 2 + 3ಟಿ, ವೈ = –1 + 2ಟಿ, z = 1 –ಟಿ.
ಗಮನಿಸಿ 2.ರೇಖೆಯು ಒಂದಕ್ಕೆ ಲಂಬವಾಗಿರಲಿ ಸಮನ್ವಯ ಅಕ್ಷಗಳು, ಉದಾಹರಣೆಗೆ ಅಕ್ಷಗಳು ಎತ್ತು. ನಂತರ ರೇಖೆಯ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ ಲಂಬವಾಗಿರುತ್ತದೆ ಎತ್ತು, ಆದ್ದರಿಂದ, ಮೀ=0. ಪರಿಣಾಮವಾಗಿ, ರೇಖೆಯ ಪ್ಯಾರಾಮೆಟ್ರಿಕ್ ಸಮೀಕರಣಗಳು ರೂಪವನ್ನು ಪಡೆಯುತ್ತವೆ
ಸಮೀಕರಣಗಳಿಂದ ನಿಯತಾಂಕವನ್ನು ಹೊರತುಪಡಿಸಿ ಟಿ, ನಾವು ರೇಖೆಯ ಸಮೀಕರಣಗಳನ್ನು ರೂಪದಲ್ಲಿ ಪಡೆಯುತ್ತೇವೆ
ಆದಾಗ್ಯೂ, ಈ ಸಂದರ್ಭದಲ್ಲಿಯೂ ಸಹ, ರೇಖೆಯ ಅಂಗೀಕೃತ ಸಮೀಕರಣಗಳನ್ನು ರೂಪದಲ್ಲಿ ಔಪಚಾರಿಕವಾಗಿ ಬರೆಯಲು ನಾವು ಒಪ್ಪುತ್ತೇವೆ ![]() . ಹೀಗಾಗಿ, ಒಂದು ಭಿನ್ನರಾಶಿಯ ಛೇದವು ಶೂನ್ಯವಾಗಿದ್ದರೆ, ಇದರರ್ಥ ನೇರ ರೇಖೆಯು ಅನುಗುಣವಾದ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಕ್ಕೆ ಲಂಬವಾಗಿರುತ್ತದೆ.
. ಹೀಗಾಗಿ, ಒಂದು ಭಿನ್ನರಾಶಿಯ ಛೇದವು ಶೂನ್ಯವಾಗಿದ್ದರೆ, ಇದರರ್ಥ ನೇರ ರೇಖೆಯು ಅನುಗುಣವಾದ ನಿರ್ದೇಶಾಂಕ ಅಕ್ಷಕ್ಕೆ ಲಂಬವಾಗಿರುತ್ತದೆ.
ಅಂಗೀಕೃತ ಸಮೀಕರಣಗಳನ್ನು ಹೋಲುತ್ತದೆ ![]() ಅಕ್ಷಗಳಿಗೆ ಲಂಬವಾಗಿರುವ ನೇರ ರೇಖೆಗೆ ಅನುರೂಪವಾಗಿದೆ ಎತ್ತುಮತ್ತು ಓಹ್ಅಥವಾ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾಗಿರುತ್ತದೆ ಓಝ್.
ಅಕ್ಷಗಳಿಗೆ ಲಂಬವಾಗಿರುವ ನೇರ ರೇಖೆಗೆ ಅನುರೂಪವಾಗಿದೆ ಎತ್ತುಮತ್ತು ಓಹ್ಅಥವಾ ಅಕ್ಷಕ್ಕೆ ಸಮಾನಾಂತರವಾಗಿರುತ್ತದೆ ಓಝ್.
ಉದಾಹರಣೆಗಳು.
ಎರಡು ವಿಮಾನಗಳ ಛೇದನದ ರೇಖೆಗಳಂತೆ ನೇರ ರೇಖೆಯ ಸಾಮಾನ್ಯ ಸಮೀಕರಣಗಳು
ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಪ್ರತಿ ಸರಳ ರೇಖೆಯ ಮೂಲಕ ಲೆಕ್ಕವಿಲ್ಲದಷ್ಟು ವಿಮಾನಗಳಿವೆ. ಅವುಗಳಲ್ಲಿ ಯಾವುದಾದರೂ ಎರಡು, ಛೇದಿಸಿ, ಅದನ್ನು ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ವ್ಯಾಖ್ಯಾನಿಸಿ. ಪರಿಣಾಮವಾಗಿ, ಅಂತಹ ಯಾವುದೇ ಎರಡು ಸಮತಲಗಳ ಸಮೀಕರಣಗಳನ್ನು ಒಟ್ಟಿಗೆ ಪರಿಗಣಿಸಿ, ಈ ಸಾಲಿನ ಸಮೀಕರಣಗಳನ್ನು ಪ್ರತಿನಿಧಿಸುತ್ತದೆ.
ಸಾಮಾನ್ಯವಾಗಿ, ಸಾಮಾನ್ಯ ಸಮೀಕರಣಗಳಿಂದ ನೀಡಲಾದ ಯಾವುದೇ ಎರಡು ಸಮಾನಾಂತರವಲ್ಲದ ವಿಮಾನಗಳು

ಅವುಗಳ ಛೇದನದ ನೇರ ರೇಖೆಯನ್ನು ನಿರ್ಧರಿಸಿ. ಈ ಸಮೀಕರಣಗಳನ್ನು ಕರೆಯಲಾಗುತ್ತದೆ ಸಾಮಾನ್ಯ ಸಮೀಕರಣಗಳುನೇರ.
ಉದಾಹರಣೆಗಳು.
ಸಮೀಕರಣಗಳಿಂದ ನೀಡಲಾದ ರೇಖೆಯನ್ನು ನಿರ್ಮಿಸಿ ![]()
ಸರಳ ರೇಖೆಯನ್ನು ನಿರ್ಮಿಸಲು, ಅದರ ಯಾವುದೇ ಎರಡು ಬಿಂದುಗಳನ್ನು ಕಂಡುಹಿಡಿಯುವುದು ಸಾಕು. ನಿರ್ದೇಶಾಂಕ ವಿಮಾನಗಳೊಂದಿಗೆ ನೇರ ರೇಖೆಯ ಛೇದನದ ಬಿಂದುಗಳನ್ನು ಆಯ್ಕೆ ಮಾಡುವುದು ಸುಲಭವಾದ ಮಾರ್ಗವಾಗಿದೆ. ಉದಾಹರಣೆಗೆ, ವಿಮಾನದೊಂದಿಗೆ ಛೇದನದ ಬಿಂದು xOyನಾವು ಸರಳ ರೇಖೆಯ ಸಮೀಕರಣಗಳಿಂದ ಪಡೆದುಕೊಳ್ಳುತ್ತೇವೆ, ಊಹಿಸಿಕೊಳ್ಳುತ್ತೇವೆ z= 0:
ಈ ವ್ಯವಸ್ಥೆಯನ್ನು ಪರಿಹರಿಸಿದ ನಂತರ, ನಾವು ಪಾಯಿಂಟ್ ಅನ್ನು ಕಂಡುಕೊಳ್ಳುತ್ತೇವೆ ಎಂ 1 (1;2;0).
ಅಂತೆಯೇ, ಊಹಿಸುವುದು ವೈ= 0, ನಾವು ಸಮತಲದೊಂದಿಗೆ ರೇಖೆಯ ಛೇದನದ ಬಿಂದುವನ್ನು ಪಡೆಯುತ್ತೇವೆ xOz:
![]()
ಸರಳ ರೇಖೆಯ ಸಾಮಾನ್ಯ ಸಮೀಕರಣಗಳಿಂದ ಅದರ ಅಂಗೀಕೃತ ಅಥವಾ ಪ್ಯಾರಾಮೆಟ್ರಿಕ್ ಸಮೀಕರಣಗಳಿಗೆ ಹೋಗಬಹುದು. ಇದನ್ನು ಮಾಡಲು ನೀವು ಕೆಲವು ಪಾಯಿಂಟ್ ಕಂಡುಹಿಡಿಯಬೇಕು ಎಂ 1 ನೇರ ರೇಖೆಯಲ್ಲಿ ಮತ್ತು ನೇರ ರೇಖೆಯ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್.
ಪಾಯಿಂಟ್ ನಿರ್ದೇಶಾಂಕಗಳು ಎಂ 1 ಈ ಸಮೀಕರಣಗಳ ವ್ಯವಸ್ಥೆಯಿಂದ ನಾವು ಪಡೆಯುತ್ತೇವೆ, ನಿರ್ದೇಶಾಂಕಗಳಲ್ಲಿ ಒಂದಕ್ಕೆ ಅನಿಯಂತ್ರಿತ ಮೌಲ್ಯವನ್ನು ನೀಡುತ್ತದೆ. ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ ಅನ್ನು ಕಂಡುಹಿಡಿಯಲು, ಈ ವೆಕ್ಟರ್ ಎರಡೂ ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ಗಳಿಗೆ ಲಂಬವಾಗಿರಬೇಕು ಎಂಬುದನ್ನು ಗಮನಿಸಿ ![]() ಮತ್ತು
ಮತ್ತು ![]() . ಆದ್ದರಿಂದ, ನೇರ ರೇಖೆಯ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ ಮೀರಿ ಎಲ್ನೀವು ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ಗಳ ವೆಕ್ಟರ್ ಉತ್ಪನ್ನವನ್ನು ತೆಗೆದುಕೊಳ್ಳಬಹುದು:
. ಆದ್ದರಿಂದ, ನೇರ ರೇಖೆಯ ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ ಮೀರಿ ಎಲ್ನೀವು ಸಾಮಾನ್ಯ ವೆಕ್ಟರ್ಗಳ ವೆಕ್ಟರ್ ಉತ್ಪನ್ನವನ್ನು ತೆಗೆದುಕೊಳ್ಳಬಹುದು:
 .
.
ಉದಾಹರಣೆ.ಮುನ್ನಡೆ ಸಾಮಾನ್ಯ ಸಮೀಕರಣಗಳುನೇರ ![]() ಅಂಗೀಕೃತ ರೂಪಕ್ಕೆ.
ಅಂಗೀಕೃತ ರೂಪಕ್ಕೆ.
ಒಂದು ಸಾಲಿನಲ್ಲಿ ಇರುವ ಬಿಂದುವನ್ನು ಕಂಡುಹಿಡಿಯೋಣ. ಇದನ್ನು ಮಾಡಲು, ನಾವು ನಿರ್ದೇಶಾಂಕಗಳಲ್ಲಿ ಒಂದನ್ನು ನಿರಂಕುಶವಾಗಿ ಆಯ್ಕೆ ಮಾಡುತ್ತೇವೆ, ಉದಾಹರಣೆಗೆ, ವೈ= 0 ಮತ್ತು ಸಮೀಕರಣಗಳ ವ್ಯವಸ್ಥೆಯನ್ನು ಪರಿಹರಿಸಿ:
![]()
ರೇಖೆಯನ್ನು ವ್ಯಾಖ್ಯಾನಿಸುವ ವಿಮಾನಗಳ ಸಾಮಾನ್ಯ ವಾಹಕಗಳು ನಿರ್ದೇಶಾಂಕಗಳನ್ನು ಹೊಂದಿವೆ ![]() ಆದ್ದರಿಂದ, ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ ನೇರವಾಗಿರುತ್ತದೆ
ಆದ್ದರಿಂದ, ದಿಕ್ಕಿನ ವೆಕ್ಟರ್ ನೇರವಾಗಿರುತ್ತದೆ
 . ಆದ್ದರಿಂದ, ಎಲ್:
. ಆದ್ದರಿಂದ, ಎಲ್: ![]() .
.
ಸ್ಟ್ರೈಟ್ಗಳ ನಡುವಿನ ಕೋನ
ಕೋನಬಾಹ್ಯಾಕಾಶದಲ್ಲಿನ ರೇಖೆಗಳ ನಡುವೆ ನಾವು ಯಾವುದನ್ನಾದರೂ ಕರೆಯುತ್ತೇವೆ ಪಕ್ಕದ ಮೂಲೆಗಳು, ಡೇಟಾಗೆ ಸಮಾನಾಂತರವಾಗಿರುವ ಅನಿಯಂತ್ರಿತ ಬಿಂದುವಿನ ಮೂಲಕ ಎಳೆಯಲಾದ ಎರಡು ಸರಳ ರೇಖೆಗಳಿಂದ ರಚಿಸಲಾಗಿದೆ.
ಬಾಹ್ಯಾಕಾಶದಲ್ಲಿ ಎರಡು ಸಾಲುಗಳನ್ನು ನೀಡೋಣ:
ನಿಸ್ಸಂಶಯವಾಗಿ, ನೇರ ರೇಖೆಗಳ ನಡುವಿನ ಕೋನ φ ಅನ್ನು ಅವುಗಳ ದಿಕ್ಕಿನ ವಾಹಕಗಳ ನಡುವಿನ ಕೋನವಾಗಿ ತೆಗೆದುಕೊಳ್ಳಬಹುದು ಮತ್ತು . ರಿಂದ , ನಂತರ ನಾವು ವಾಹಕಗಳ ನಡುವಿನ ಕೋನದ ಕೊಸೈನ್ ಸೂತ್ರವನ್ನು ಬಳಸುತ್ತೇವೆ









